Haar-like特征
本文共 601 字,大约阅读时间需要 2 分钟。
Haar-like特征最早是由Papageorgiou等应用于人脸表示,Viola和Jones在此基础上,使用3种类型4种形式的特征。Haar特征分为四类:边缘特征、线性特征、中心特征和对角线特征,组合成特征模板。特征模板内有白色和黑色两种矩形,并定义该模板的特征值为白色矩形像素和减去黑色矩形像素和。Haar特征值反映了图像的灰度变化情况。例如:脸部的一些特征能由矩形特征简单的描述,如:眼睛要比脸颊颜色要深,鼻梁两侧比鼻梁颜色要深,嘴巴比周围颜色要深等。但矩形特征只对一些简单的图形结构,如边缘、线段较敏感,所以只能描述特定走向(水平、垂直、对角)的结构。
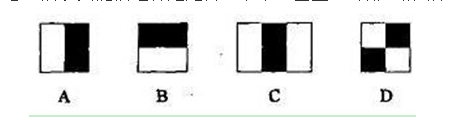
对于图中的A, B和D这类特征,特征数值计算公式为:v=Sum白-Sum黑,而对于C来说,计算公式如下:v=Sum白-2*Sum黑;之所以将黑色区域像素和乘以2,是为了使两种矩形区域中像素数目一致。 通过改变特征模板的大小和位置,可在图像子窗口中穷举出大量的特征。上图的特征模板称为“特征原型”;特征原型在图像子窗口中扩展(平移伸缩)得到的特征称为“矩形特征”;矩形特征的值称为“特征值”。 矩形特征可位于图像任意位置,大小也可以任意改变,所以矩形特征值是矩形模版类别、矩形位置和矩形大小这三个因素的函数。故类别、大小和位置的变化,使得很小的检测窗口含有非常多的矩形特征,如:在24*24像素大小的检测窗口内矩形特征数量可以达到16万个。
你可能感兴趣的文章
Pixhawk解锁常见错误
查看>>
ROS是不是可以理解成一个虚拟机,就是操作系统之上的操作系统
查看>>
用STL algorithm轻松解决几道算法面试题
查看>>
ACfly之所以不怕炸机因为它觉得某个传感器数据不安全就立马不用了
查看>>
我发觉,不管是弄ROS OPENCV T265二次开发 SDK开发 caffe PX4 都是用的C++
查看>>
ROS的安装(包含文字和视频教程,我的ROS安装教程以这篇为准)
查看>>
原来我之前一直用的APM固件....现在很多东西明白了。
查看>>
realsense-ros里里程计相关代码
查看>>
似乎写个ROS功能包并不难,你会订阅话题发布话题,加点逻辑处理,就可以写一些基础的ROS功能包了。
查看>>
if __name__ == ‘__main__‘:就是Python里的main函数,脚本从这里开始执行,如果没有main函数则从上到下顺序执行。
查看>>
PX4官方用户和开发手册的首页面是会给你选择英文和中文的
查看>>
《跟工程师学嵌入式开发》这本书最后的终极项目我反而觉得有说头
查看>>
博士的申请考核制
查看>>
MAVLink学习之路05_MAVLink应用编程接口分析(也有讲STM32下的收发函数)
查看>>
找到了中文版的mavlink手册
查看>>
浅谈飞控开发的仿真功能
查看>>
我觉得在室内弄无人机开发装个防撞机架还是很有必要的,TBUS就做得很好。
查看>>
serial也是见到很多次了,似乎它就是一种串行通信协议
查看>>
TBUS的一些信息
查看>>
PX4+激光雷达在gazebo中仿真实现(古月居)
查看>>